图像处理中,'空间域' 指的是图像平面,因此,空间滤波可定义为:在图像平面内对像素灰度值进行的滤波
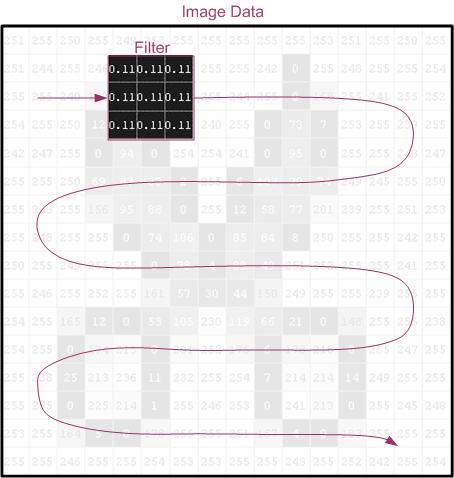
1 空间滤波1.1 滤波过程如图,Filter 是一个 3x3 滤波核,当它从图像的左上角开始,逐个像素沿水平方向扫描,最后到右下角时,便会产生滤波后的图像
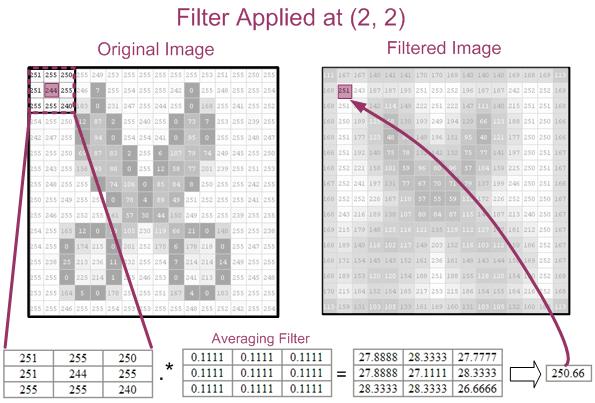
假设输入图像 $f(x, y)$,滤波后的图像为$g(x, y)$,则其中$g(2,2)$ 和 $g(4,4)$ 的计算过程如下:
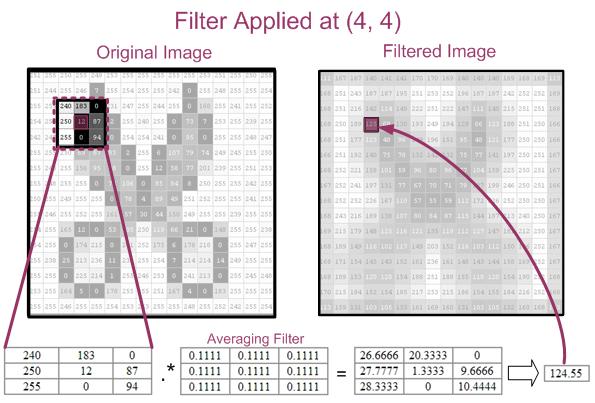
上图中,以像素 (4,4) 为中心的 3x3 邻域,和滤波核的向量点乘之积,即为 g(4,4)
g(4,4) = 240*0.1111 + 183*0.1111 + 0*0.1111 + 250*0.1111 + 12*0.1111 + 87*0.1111 + 255*0.1111 + 1*0.1111 + 94*0.1111
= 26.6666 + 20.3333 + 0 + 27.7777 + 1.3333 + 9.6666 + 28.3333 + 0 + 10.4444
= 124.55
1.2 相关和卷积空间滤波中,相关和卷积,是容易混淆的概念,定义如下:
-相关 (Correlation),和上述的滤波过程一样,即 滤波核 逐行扫描图像,并计算每个位置像素点积的过程
-卷积 (Convolution),和 '相关' 过程类似,但 滤波核 要先旋转 180°,然后再执行和 “相关” 一样的操作
(二维中的旋转 180°,等于滤波核沿一个坐标轴翻转,然后再沿另一个坐标轴翻转)

注意:如果滤波核是对称的,则对图像进行相关和卷积的结果是一致的
2 OpenCV 函数2.1 filter2D 函数在 OpenCV 中,可自定义滤波核,然后通过 filter2D() 来完成图像滤波
void filter2D( InputArray src, // 输入图像 OutputArray dst, // 输出图像(大小和通道数,同 src) int ddepth, // 输出图像的 depth InputArray kernel, // 滤波核,准确地说,是相关核 Point anchor = Point(-1,-1), // 锚点位置,滤波核尺寸为奇数时,不用指定,一般取默认值 Point(-1,-1);滤波核尺寸为偶数时,需指定锚点位置 double delta = 0, // optional value added to the filtered pixels before storing them in dst int borderType = BORDER_DEFAULT // 边界处理方法 );
filter2D() 求的是相关,并非卷积,只有当滤波核对称时,filte2D() 才可视为卷积运算,其公式如下:
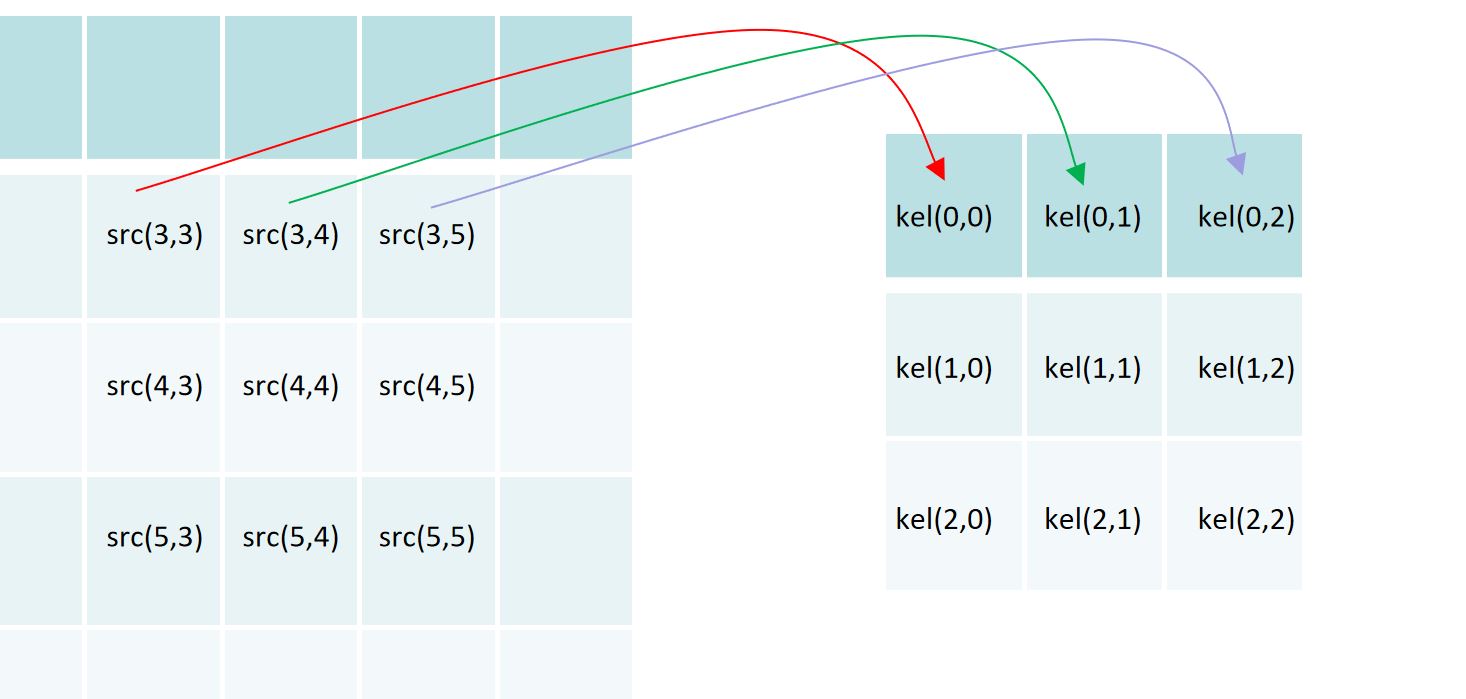
假定滤波核 kernel 大小为 3x3,以一个像素点 src(4,4) 为例,则有:
dst(4,4) = kernel(0,0)*src(4+0-1, 4+0-1) + kernel(0,1)*src(4+0-1, 4+1-1) + kernel(0,2)*src(4+0-1, 4+2-1)
+ kernel(1,0)*src(4+1-1, 4+0-1) + kernel(1,1)*src(4+1-1, 4+1-1) + kernel(1,2)*src(4+1-1, 4+2-1)
+ kernel(2,0)*src(4+2-1, 4+0-1) + kernel(2,1)*src(4+2-1, 4+1-1) + kernel(2,2)*src(4+2-1, 4+2-1)
滤波核与输入图像的卷积点乘,对应关系如下:
当滤波核不对称时,要得到真正的卷积运算,还需 flip() 函数来完成 kernel 的二维翻转
如果滤波核的大小为奇数,则 filter2D() 中的锚点位置可设为 Point(-1,-1),此时,默认滤波核的中心为锚点;如果滤波核的大小为偶数,则需要自定义锚点位置
OpenCV 中锚点位置的实现函数normalizeAnchor() 如下:
void flip( InputArray src, // input array OutputArray dst, // output array int flipCode // 0, flip around x-axis; positive value, flip around y-axis; negative value, flip around both axes. );3 代码示例3.1 偏导数
自定义滤波核,利用 filter2D() 函数,实现图像的一阶和二阶偏导运算
1) 一阶偏导
图像在 x 和 y 方向的一阶偏导如下:
对应滤波核为
2) 二阶偏导
同样,在 x 和 y 方向的二阶偏导如下:
对应滤波核为
3.2 代码示例
#include 'opencv2/imgproc.hpp'#include 'opencv2/highgui.hpp'using namespace cv;int main(){ // 读取图像 Mat src = imread('fangtze.jpg', IMREAD_GRAYSCALE); if (src.empty()) { return -1; } Mat kx = (Mat_<float>(1, 2) << -1, 1); // 1行2列的 dx 滤波核 Mat ky = (Mat_<float>(2, 1) << -1, 1); // 2行1列的 dy 滤波核 Mat kxx = (Mat_<float>(1, 3) << 1, -2, 1); // 1行3列的 dxx 滤波核 Mat kyy = (Mat_<float>(3, 1) << 1, -2, 1); // 3行1列的 dyy 滤波核 Mat kxy = (Mat_<float>(2, 2) << 1, -1, -1, 1); // 2行2列的 dxy 滤波核 // 一阶偏导 Mat dx, dy; filter2D(src, dx, CV_32FC1, kx); filter2D(src, dy, CV_32FC1, ky); // 二阶偏导 Mat dxx, dyy, dxy; filter2D(src, dxx, CV_32FC1, kxx); filter2D(src, dyy, CV_32FC1, kyy); filter2D(src, dxy, CV_32FC1, kxy); // 显示图像 imshow('dx', dx); waitKey();}
输出的偏导图像如下,第一行从左到右:原图 - dx - dy;第二行从左至右:dxy - dxx -dyy





OpenCV Tutorials / imgproc module /Making your own linear filters
Gonzalez,《Digital Image Processing》4th ch3 Intesity Transformations and Spatial Filtering
CS425 Lab: Intensity Transformations and Spatial Filtering
总结到此这篇关于OpenCV图像处理之自定义滤波的文章就介绍到这了,更多相关OpenCV自定义滤波内容请搜索乐呵呵网以前的文章或继续浏览下面的相关文章希望大家以后多多支持乐呵呵网!